








Не мудрено, что работа спасателей на воде крайне трудна, особенно если нужно обнаружить нечто, чьи координаты не известны доподлинно. Им приходится постоянно нырять под воду, выниривать, передавать информацию, мало того что это занимает буквально жизненно важное время, так и утомляет спасателя, в итоге качество его работы снижается. Особенно тяжело им приходится, если вода мутная. В принципе, последнее и есть основной мотив создания удивительной конструкции IrukaTact. Это погружная тактильная перчатка с обратной связью, которая позволяет пользователям «ощутить и прощупать» все что находится в водной толще без необходимости ныряния.

Разработанные кандидатами в доктора наук Айсеном Каро Чачин и Такеши Одзу в Японском Университете Цукуба, перчатки берут свое название от японских слов «Дельфин» и «Ирука.» Это морское млекопитающее, он использует эхолокацию для поиска предметов под водой.
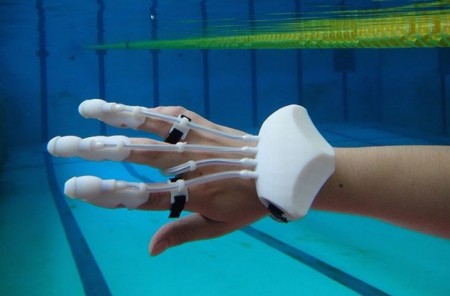
В случае с IrukaTact, функциональность обеспечивается MaxBotix сонарным датчиком ультразвукового диапазона, который направлен вниз от запястья. Через бортовой компьютер Arduino (профессиональный микрокомпьютер) будут перениматься отраженные гидроакустические сигналы от датчика и активировать три микронасоса.
Они в свою очередь привлекают струи воды в силиконовой шапке поверх каждого из трех покрытых пальцев, избирательно давят на один или несколько соответствующих пальцев. Чем ближе подводной элемент к пальцу, тем сильнее будет давление. Это позволяет пользователям почувствовать контуры дна или затопленные объекты.

Устройство в настоящее время имеет сонарный круг около 0,6 метров, хотя есть планы по улучшению этого показателя. Питание обеспечивается встроенной литий-ионной батареей.
Исследователи считают, что с открытым исходным кодом перчатка может также найти применение в виртуальной реальности и в приложениях вроде «цифрового моделирования объектов в водных средах» .






