








Вдохновленная водными прогулками команда из университета Бристоль создала Row-bot, прототип робота предназначенный для поглощения вредных бактерий с поверхности воды и для осуществления двигательных функций по воде в автоматизированном режиме.
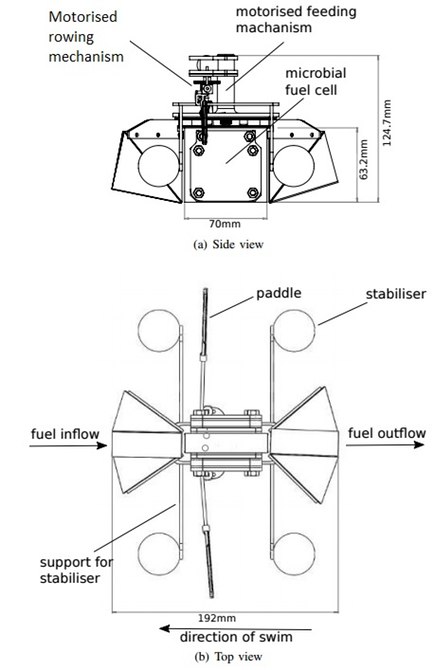
Row-bot состоит из двух основополагающих элементов: приводного механизма для перемещения устройства с помощью весла, управляемого маленьким на 0,75Вт коллекторным двигателем постоянного тока и из желудка, где топливные элементы перерабатываются в ток для питания двигателя.
Работает это устройство как минимум интересно. Row-bot начинает движение сразу же как только робот глотает немного воды и пожинает своих первых микробов, потом эти микроорганизмы превращаются в топливо и заставляют работать такой бактериальный двигатель активнее, соответственно и весла подключенные к нему начинают работать быстрее. Таким образом он постоянно генерирует достаточно энергии, чтобы постоянно побуждать себя к поискам новой пищи.
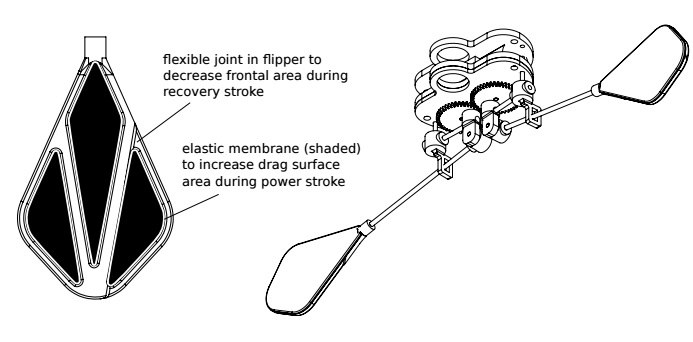
Поддерживающие эластичность оболочки структуры композита с жесткой рамой построены с помощью 3D печати, они находятся в конструкции затем, чтобы каждый затвор мог растягиваться и расширять рабочую площадь во время хода этого робота. Мембрана, поглощающая загрязнение с поверхности воды, имеет шарнир для изменения угла активности для той части лопатки, что находится под водой — это сделано для уменьшения рабочей поверхности, и следовательно сопротивления воды ей.
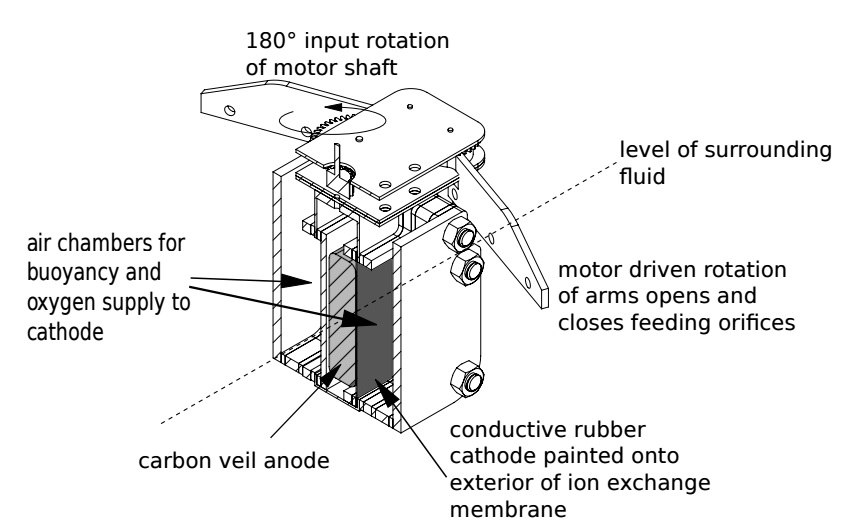
Робот использует для переработки бактерий в энергию похожую технологию на ту, что перерабатывает в ток мочу. В его устройстве находится обычный топливо-перерабатывающий элемент, однако, работающий за счет бактерий, имитируя внутри своей конструкции реальное взаимодействие их в природе. Когда микроорганизмы питаются сахаром в аэробных условиях (при присутствии кислорода), они производят углекислый газ и воду. Но, в анаэробных условиях (при отсутствии кислорода), они производят уже три элемента: углекислый газ, протоны и электроны. Таким образом, ток необходимый для работы системы создается между двумя электродами.
Исследователи полагают, что устройство имеет множество сфер применения в качестве энергетически автономных работ, в том числе и для дистанционного зондирования и экологического мониторинга сопряженного с очисткой. В связи с этим, следующим этапом разработки будет интегрирование системы мониторинга и управления подсистемами, а также внедрение ряда коммуникаций внутрь устройства.
Результаты этого исследования были недавно представлены в статье в рамках Международной конференции по интеллектуальным роботам и системам (МРО) в Гамбурге, Германия.






