








Клетки спермы используются в роботах, для достижения половой клетки женщины. Это может показаться далеко от реальности, но именно такие опыты провели исследователи университета в Дрездене, который занимается нанотехнологиями. Их «спермоботы» состоят из живых клеток спермы, которые помещены в маленькие трубки. Они управляются магнитом и двигаются в нужном направлении. Движение продолжается до тех пор, пока роботы не достигают нужного места, где выполняют необходимую работу. Данные роботы достаточно крепки чтобы доставить один необходимый сперматозоид к яйцеклетке. Надежды ученых положены на развитие данного способа оплодотворения, который поможет иметь ребенка через экстракорпоральное оплодотворение. Когда «спермоботы, достигнут определенного уровня развития, они смогут доставлять лекарства, что станет новой страницей в развитии генной инженерии.

Одной из самых основных проблем роботов является поиск топлива, которое не наносило бы вред организму человека. Нанороботы с двигателями действительно эффективнее. Чтобы перемещаться по жидкости, которая находится в организме человека, им действительно необходимо иметь топливный запас. В некоторых случаях, роботы проходят через клетки, что влияет на организм, а еще топливо имеет токсины, которые негативно сказываются на здоровье. Для преодоления этих проблем, команда специалистов из Дрездена, ищет альтернативные способы перемещения.
По словам профессора Оливера Г. Шмидта, директора института, команда научных сотрудников разработала специальный жгутик, который имитирует аналог у сперматозоидов. Этой разработке уже 5-ть лет. Она стала известна, когда при очередном исследовании обнаружили, что все сперматозоиды одинакового размера.
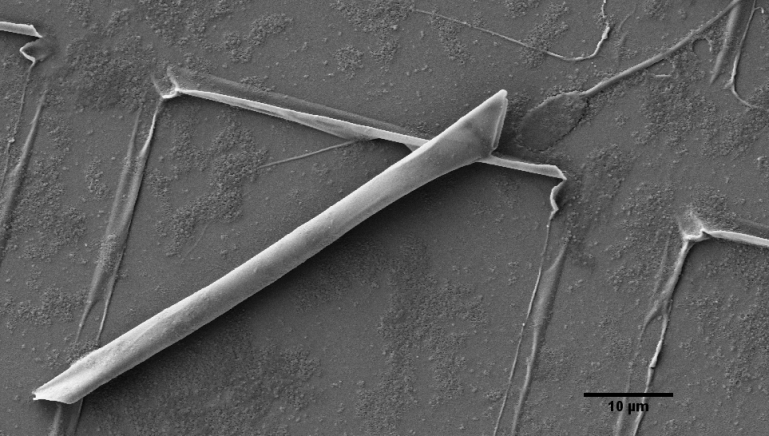
Для создания первых нанороботов использовали сперму быка, которая по размерам близка к человеческой. Именно тогда создали первые конические трубки из железа и титана. Форма слегка трубки (пробирки) с одной стороны увеличена, чтобы головка сперматозоида могла поместиться в этот резервуар.
При хаотичном движении сперматозоидов, в стеклянную пробирку опускают данные металлические конструкции. Поскольку сперматозоид движется только вперед, он оказывается в капкане и перемещает за собой железный панцирь. Полученный робот управляется отдаленно с использованием магнита, который и сопровождает сперматозоид к его цели.






