








Потенциал технологии создания виртуальных карт и сканирования в режиме реального времени весьма высок – в особенности в контексте применения данной технологии в отношении полетных дронов. Не секрет, что такие технологии и системы позволяют дронам быстрее и эффективнее находить затерявшихся туристов и выживших в лесах и других ландшафтах открытой местности – однако, что насчет подземных ходов и пещер? Специалисты из австралийского стартапа Emesant решили ответить на этот вопрос весьма оригинально, представив свою новую систему слежения и картографии в режиме реального времени для применения у дронов – эта система специально создана для облета подземных пещер и ходов.
Несмотря на то, что специалисты не вдаются пока в детали своего проекта, известно, что система представляет собой некий симбиоз между системой слежения LiDAR, традиционными GPS-сетями и системой анти-коллизионных сенсоров для того, чтобы избежать столкновения в замкнутых пространствах. Система представляет собой достаточно многообещающую разработку, притом отличаясь сравнительно малой стоимостью разработки и имплементации – впрочем, на этот счет пока что мало точной информации.
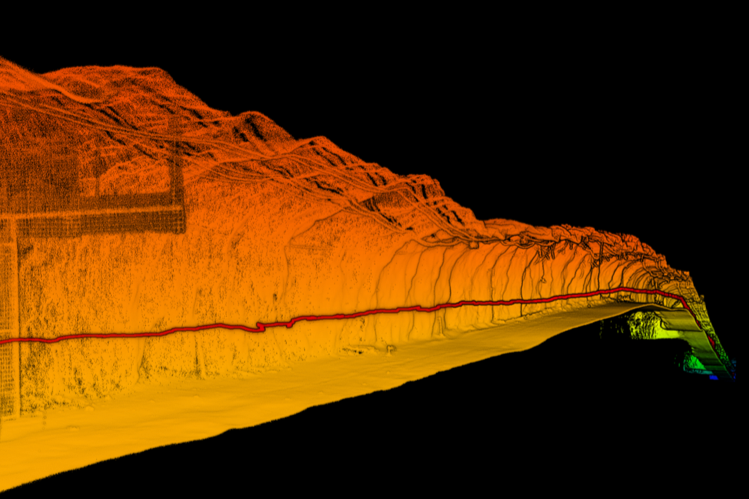
Также известно, что большая часть команды Emesant, работающая над данной системой подземного слежения, ранее была задействована в агентстве CSIRO, где работают только лучшие эксперты Австралии в сегменте прикладной робототехники и искусственного интеллекта. Их система под названием Hovermap, если верить их словам, позволяет достаточно быстро и точно составлять на основе увиденного дронами полноценные 3D-карты подземных ландшафтов.
Такой подход позволяет намного быстрее отыскивать и спасать людей, попавших в беду и не могущих выбраться самостоятельно – причем сама система представляет собой отдельный модуль, который по необходимости крепится к самому дрону для осуществления своего функционала. Известно, что новый проект австралийской команды обходится в 2,5 миллиона долларов США и вскоре станет одним из наиболее эффективных – если не самым эффективным – в сегменте данных технологий.






