







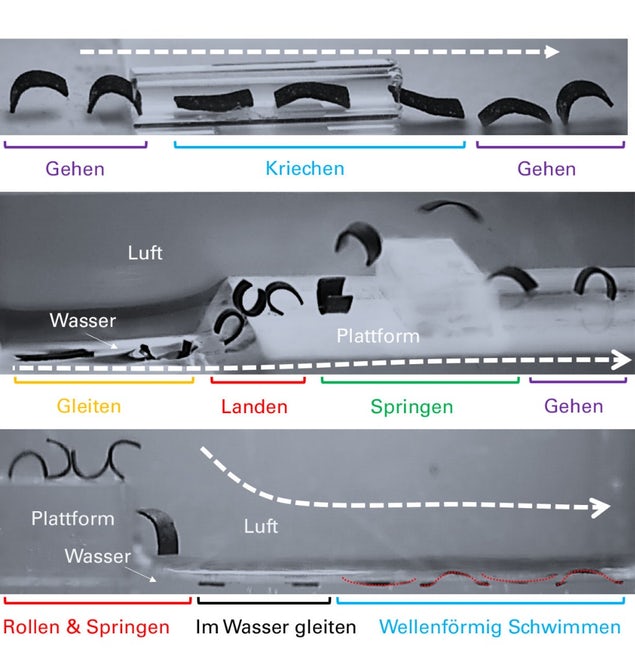
Разработано уже немало крошечных роботов, которые в будущем могут стать полезны и обыденны, они будут ползать по человеческим телам, латать раны, доставлять лекарства, чистить артерии. Одна проблема в таких роботах — их много, а функционал крайне ограничен, соответственно, светлое будущее может быть омрачено гигантским количеством роботов, которые будут давить на человека. Команда из института Макса Планка решила, что вариант с огромным количеством узконаправленных роботов не самый лучший, и разработала робота, который может ходить, ползать, прыгать, подниматься, кататься, плавать и переносить грузы.
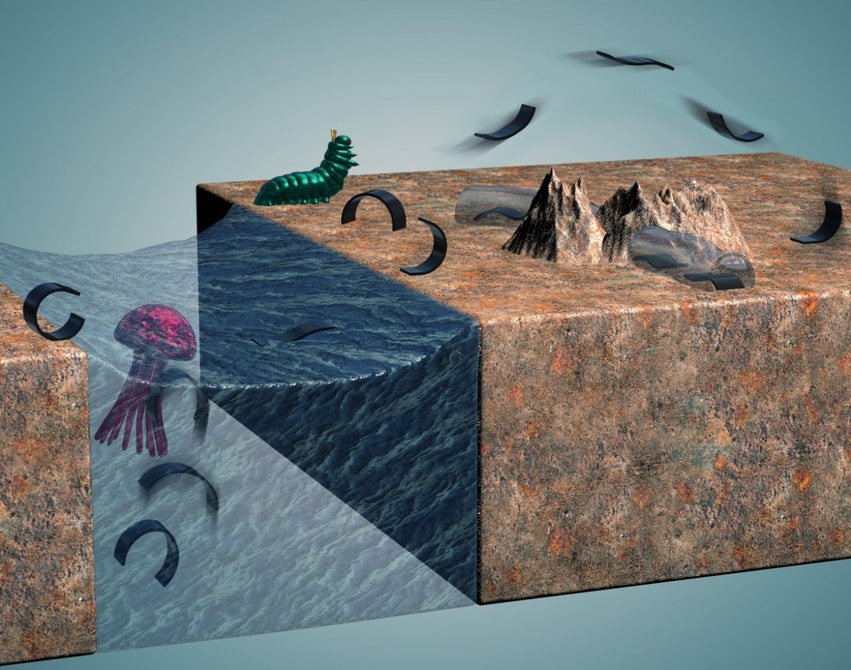
В качестве источника вдохновения команда использовала варианты созданные самой природой, движения принадлежат бактериям, морским созданиям и насекомым, а «желание» двигаться на свет было позаимствовано у некоторых видов рыб.
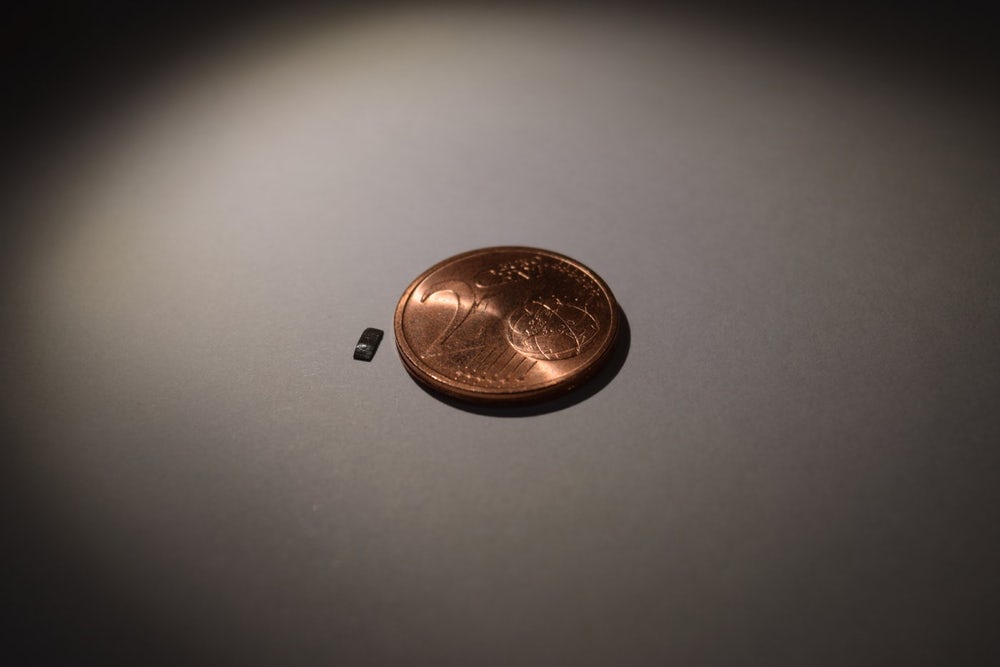
Миниробот, созданный командой, кажется небольшой гусеницей, так как он движется сжимая свое тело состоящее из эластичного кремния. Размер робота не превышает 4 миллиметров.
«Когда мы строим роботов, мы опираемся на механику движения мягких биологических организмов и вдохновляемся ими», — говорит Метин Ситти, автор исследования: «Наш миллиробот объединил несколько мягких существ, таких как личинки жука и гусеницы. Однако, моделями служили и сперматозоиды, и медузы.»
Сжимать свое тело миниробот может благодаря набору магнитных микрочастиц, создавая и манипулируя внешним магнитным полем, ученые могут направлять робота.
Команда уже протестировала миниробота на модели синтетического желудка и в курином мясе, используя ультразвуковую визуализацию, чтобы отслеживать его движения, когда он был вне поля зрения. Робот без заминки прошел испытания, и хотя в человеческом теле несколько другая среда со своими собственными проблемами, исследователи говорят, что успех служит хорошим предзнаменованием для возможного использования робота в естественных условиях.
«Наша цель в том, чтобы наш миллиробот однажды транспортировал лекарства туда, где это необходимо – подобно доставке посылок к входной двери», — говорит Ситти: «Мы планируем использовать его в минимально инвазивных медицинских процедурах: либо путем проглатывания робота, либо путем введения его в организм через небольшое отверстие на коже. Оттуда робот может перемещаться по пищеварительному тракту или мочевому пузырю, или по сердцу — мы предусматриваем множество возможностей.»






