







Для кого-то это может прозвучать как научная фантастика, но создание киборгов значительно ближе, чем нам кажется. Уже скоро дистанционно управляемый таракан-киборг сможет помочь при поиске выживших в зонах катастроф. Исследователи из Университета Северной Каролины работали над проектом в течение нескольких лет, и теперь выпустили два новых исследования о том, как можно отслеживать и управлять движениями насекомого.
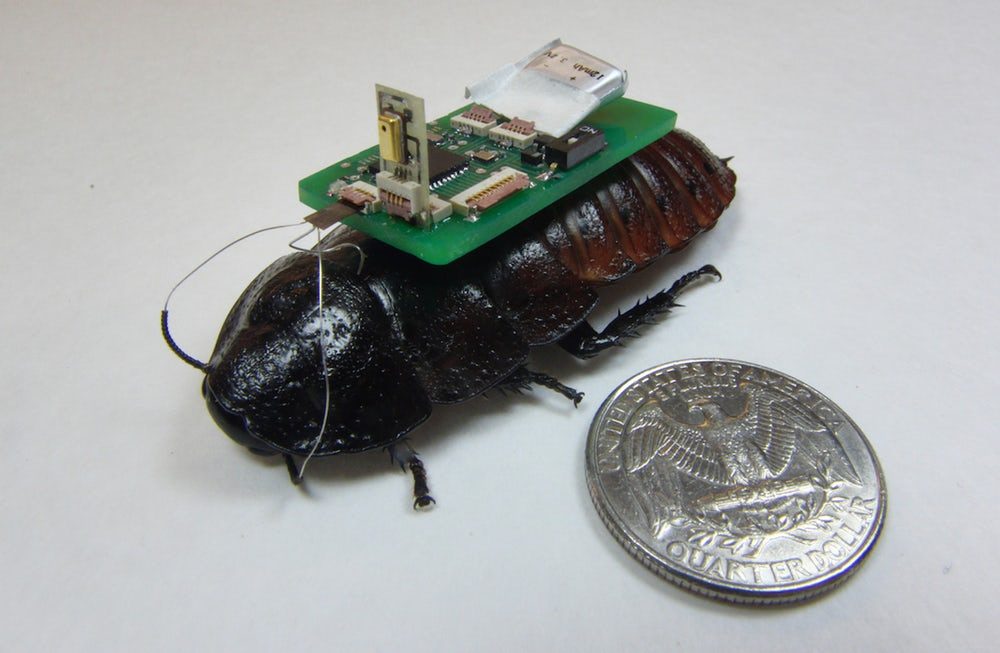
В то время как другие исследовательские группы предлагают создавать киборгов из саранчи и стрекоз, команда Университета Северной Каролины используют мадагаскарских шипящих тараканов, которые оснащены электронными «рюкзаками», содержащими простой компьютерный чип, беспроводной передатчик и микроконтроллер. Микроконтроллер подключен к органам чувств насекомого, чтобы заставить его двигаться по команде: электрические сигналы, посылаемые в его усики говорят ему повернуть налево или направо, а стимуляция церков – органов в задней части брюшка – действует как педаль газа.
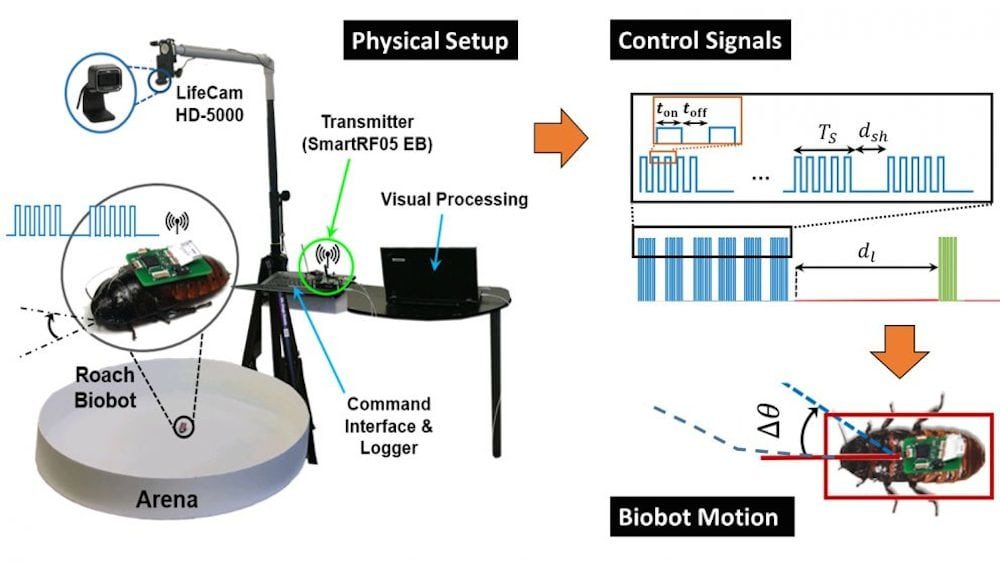
Проект Biobot Университета Северной Каролины впервые был анонсирован в 2012 году и начался с разработки программного и аппаратного обеспечения, которое способно управлять тараканами. Сейчас команда изучает, каким образом тараканы могли бы самостоятельно исследовать местность и как ими при этом управлять. В первом опубликованном исследовании ученые проверили точность измерения расстояния и направления приборами на спине насекомого, что необходимо для дистанционного управления тараканами. Второе исследование было посвящено выяснению точности управления тараканом.
«Это практическая информация, которая необходима, чтобы максимально быстро и точно исследовать местность с помощью нашего киборга», — говорит Эдгар Лобатон, один из разработчиков проекта: «Скорость особенно важна, ведь время имеет существенное значение, когда вы пытаетесь спасти выживших после катастрофы».
Чтобы ответить на эти вопросы, исследователи поместили тараканов в круглую закрытую арену. Некоторым было позволено свободно бродить без внешней стимуляции, в то время как другие управлялись дистанционно путем передачи им команд «вправо» и «влево» в случайном порядке. Обе группы показали очень разное поведение: те, что передвигались самостоятельно, как правило, держались ближе к стенам, оставляя неисследованными большие участки в центре круга. Но те, что управлялись случайными импульсами, в пять раз чаще оказывались в центре круга, что позволяло им исследовать местность полностью.






