








На данный момент в сегменте прикладной робототехники все еще присутствуют некоторые проблемные аспекты и особенности, решение которых позволило бы заметно продвинуться в понимании того, как конструировать более совершенных роботов. Именно поэтому объединённая команда исследователей из Японии и Италии решила внести свой вклад в это понимание, предложив уникальный метод построения новых паттернов движения – непосредственно походки – роботов со множеством подвижных элементов. И предварительные результаты получились очень даже многообещающими, что было в свою очередь отражено в новой статье команды в научном журнале IEEE Access.
По сути, команда разработчиков предложила новую модель иерархичного построения взаимодействия паттернов движения у роботов, что позволяет вырабатывать им новые типы движения – особенно это актуально для робота со множеством ног. Что и было продемонстрировано на специально сконструированном для этой цели роботе-пауке с шестью ногами. В основе новой технологии лежит использование двухуровневого контролера так называемых нелинейных осцилляторов.
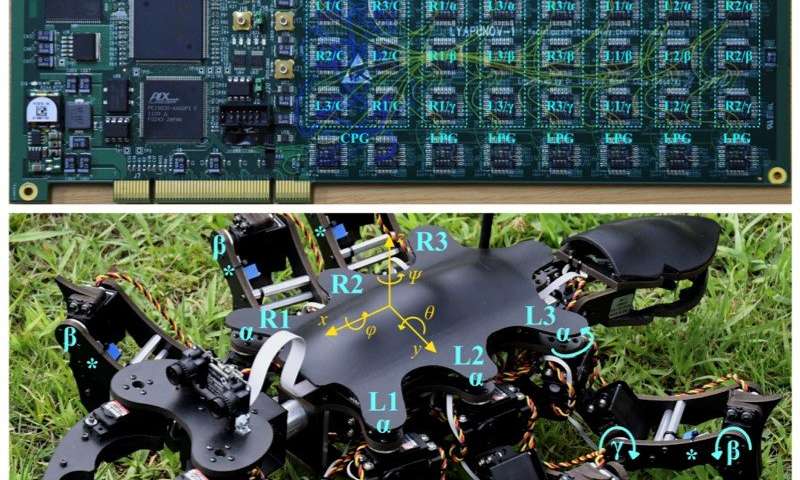
Эти осцилляторы представляют собой способ взаимодействия между специальными схемами паттернов движения в модуле искусственного интеллекта с локальными генераторами паттернов движения робота. Схемы паттернов находятся на первом уровне контроллера, в то время как локальные генераторы – на втором. Ученые главным образом анализируют естественную среду и особенности передвижения различных насекомых и животных со множеством конечностей – таким образом, данный подход стал наиболее интересным.
Именно благодаря двойному уровню работы контроллера памяти в модуле искусственного интеллекта, роботы могут быстро вырабатывать, запоминать и в дальнейшем применять новые паттерны движения. Пока что исследование было проверено на тестовом роботе, который имеет достаточно скромный модуль искусственного интеллекта, однако компания разработчиков указывает, что столь положительный результат станет еще более заметным в том случае, если применить более функциональный модуль искусственного интеллекта.






